一. 理解ROS 节点:
ROS的节点: 可以说是一个可运行的程序。当然这个程序可不简单。因为它可以接受来自ROS网络上其他可运行程序的输出信息,也可以发送信息给ROS网络,被其他 ROS 可运行程序 接收。所以虽然你看ROS它是在执行好多个程序,但是它们可是相互关联的,是一个网络。所以 Willow Garage 公司管这种可运行的程序叫做: 节点。
二. 运行ros节点的大前提:
启动roscore (它是运行所有ROS程序前 首先要运行的命令) 。新开一个终端(Ctrl+Alt+T):新开一个终端(Ctrl+Alt+T):
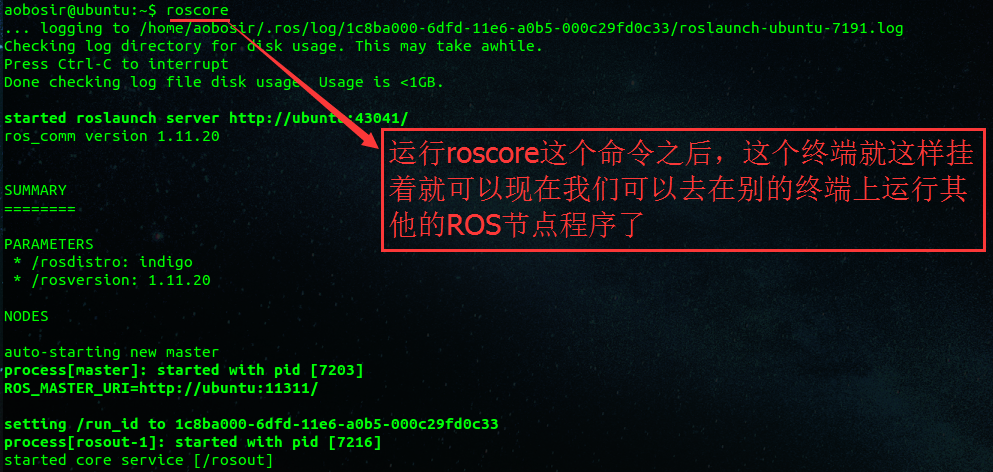
roscore命令执行完之后,它也会产生一个节点,这个节点是主节点,叫:/rosout。
三. 查看当前运行的 ROS 节点
当前有什么节点在运行:重新开一个终端,执行 rosnode list命令 就可以罗列出当前运行的所有ROS节点:

rosnode info /rosout命令: 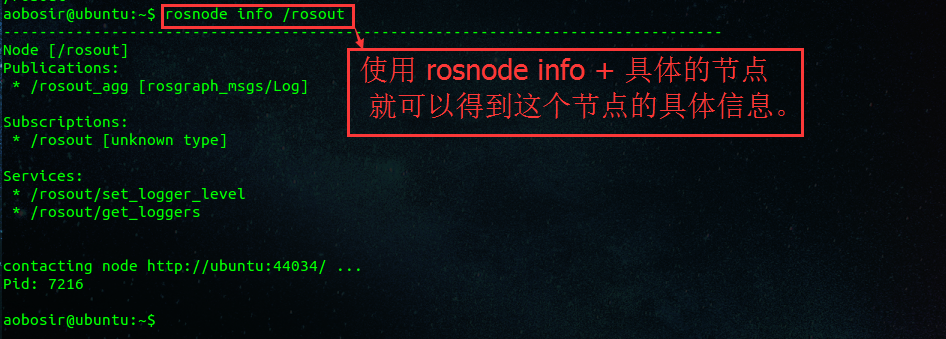
四. 例子,运行一个节点:
下面来具体运行一个 ros节点 程序,使用什么命令运行它 呢? 答案: rosrun 命令。
rosrun命令的使用格式:# rosrun [package_name] [node_name]其中:package_name是程序包名;node_name是ros节点的可执行程序的名字。
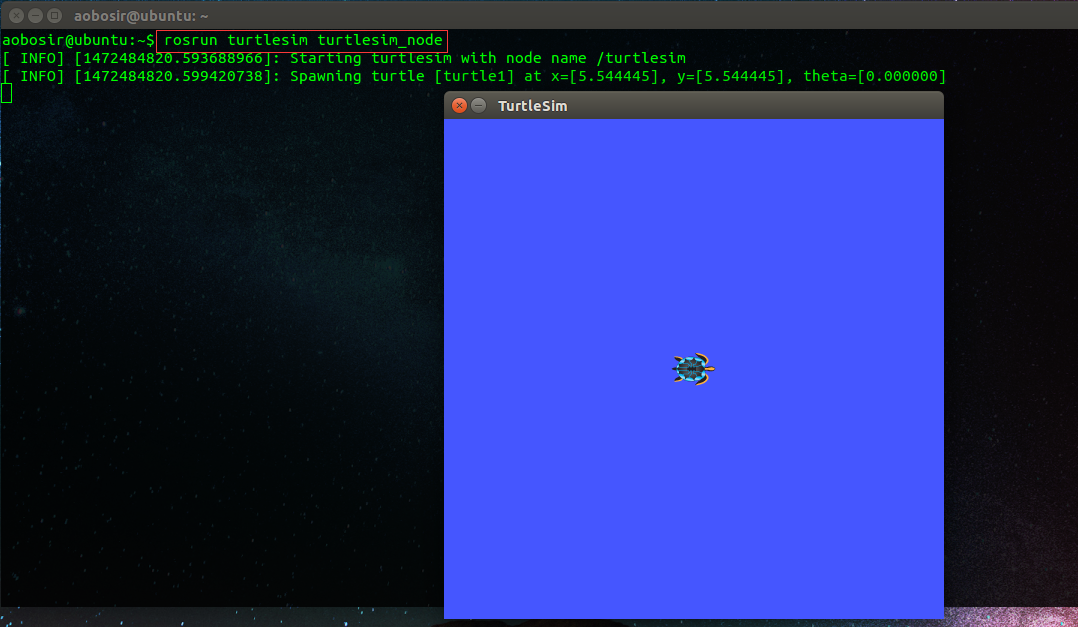
比如: 运行一个 ROS 里的例子程序: (这个例子是开一个窗口,窗口里面有一只小海龟。只是想举一个例子来让大家直观的看看ROS节点是个什么东西。)
$ rosrun turtlesim turtlesim_node
输出:
我们重新开个终端(Ctrl+Alt+T),执行 rosnode list 命令,再来看现在有哪些节点在运行:
/rosout/turtlesim

六. ping一个ROS节点
你看ROS它是在执行好多个程序,但是它们可是相互关联的,是一个网络。所以我们可以ping任何一个节点。
$ rosnode ping /my_turtle
